2021
·
Completed
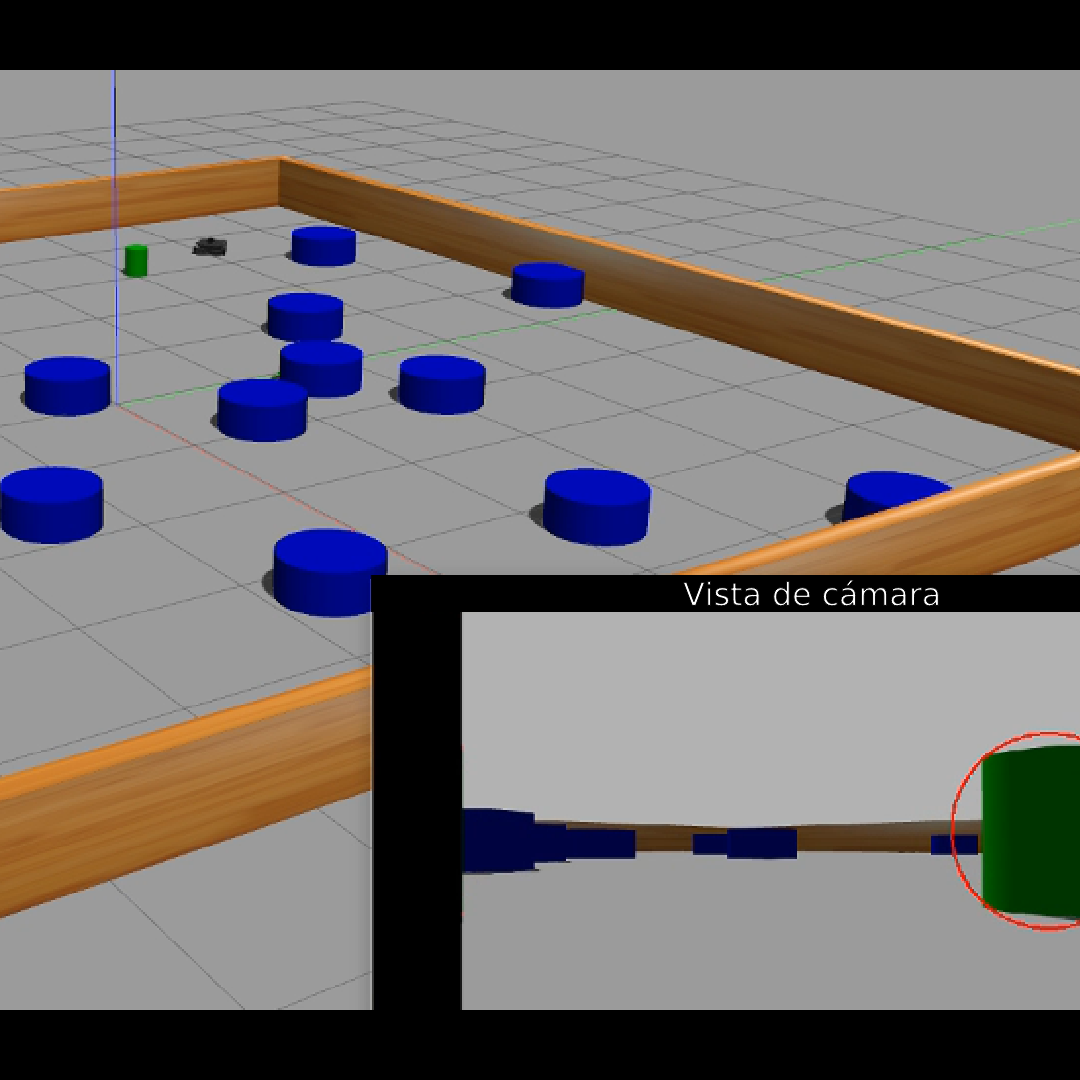
Developed an actor-critic agent (PPO) applied on a mobile robot for exploration and navigation tasks. Intrinsic rewards formulated from Random Network Distillation module. Tech: OpenAI Gym, PyTorch, ROS
2021
·
Completed
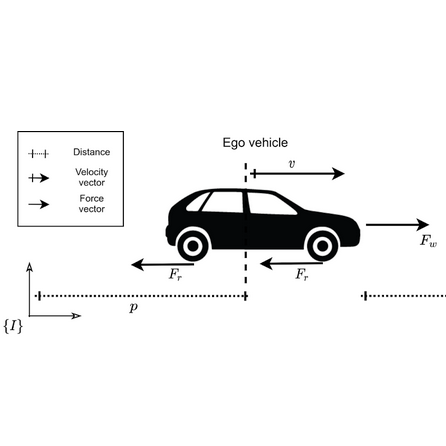
Using Online Sequential Extreme Machine Learning for real-time uncertainty correction in the Adaptive Cruise Control problem. Project part of the Robotics Program RISS at Carnegie Mellon University. Tech: Torch
2020
·
Completed
A PD with Gravity Compensation and Sliding Mode Control Comparison. Trajectory tracking comparison between PI and SMC under gaussian disturbances. ICCAD 2020. Tech: ROS
2020
·
Completed
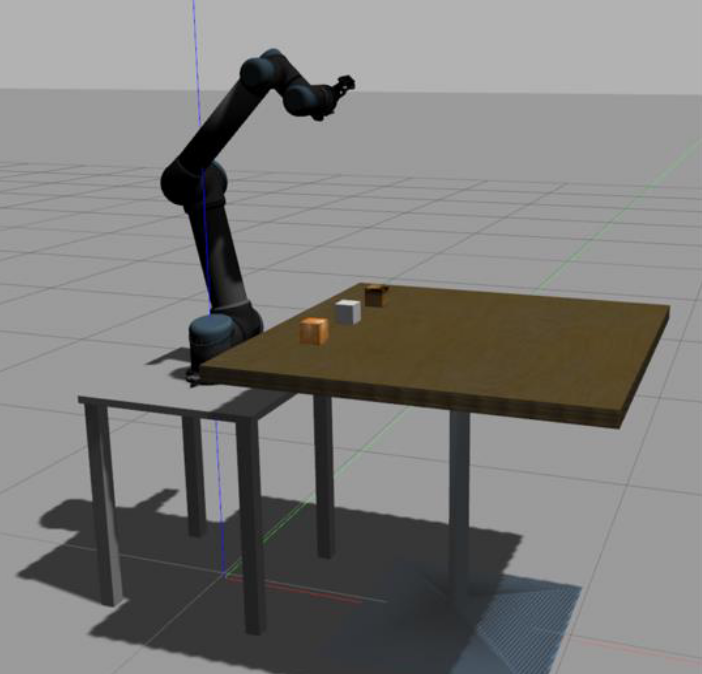
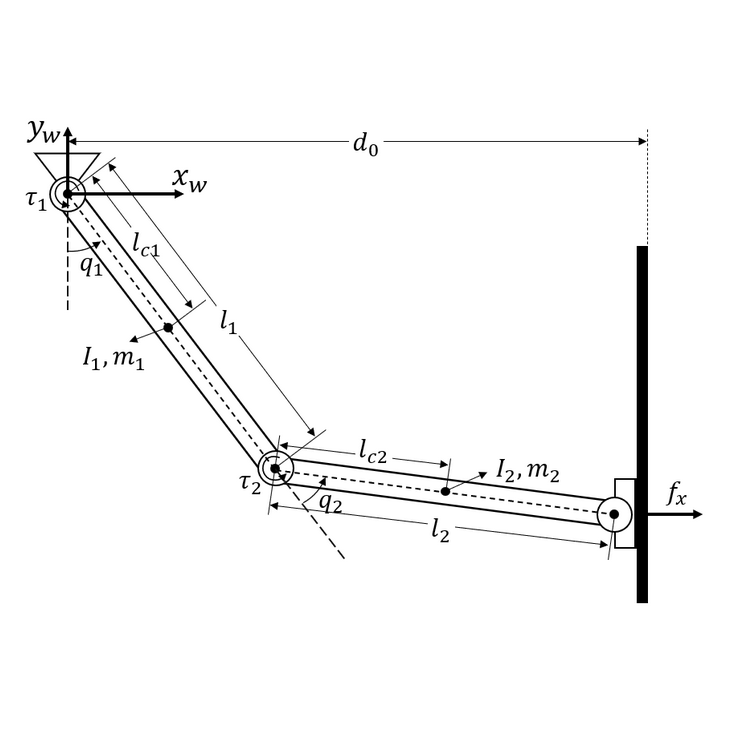
Transforming torque inputs into position inputs for a manipulator robot in cleaning window task. Proposed hybrid controller composed of a learning approach and inverse dynamics. CDC 2020.

2020
·
Completed
Robot platform based on haptic technology for surgery tasks based on UR5 manipulator robots. Project fully funded by CONCYTEC.